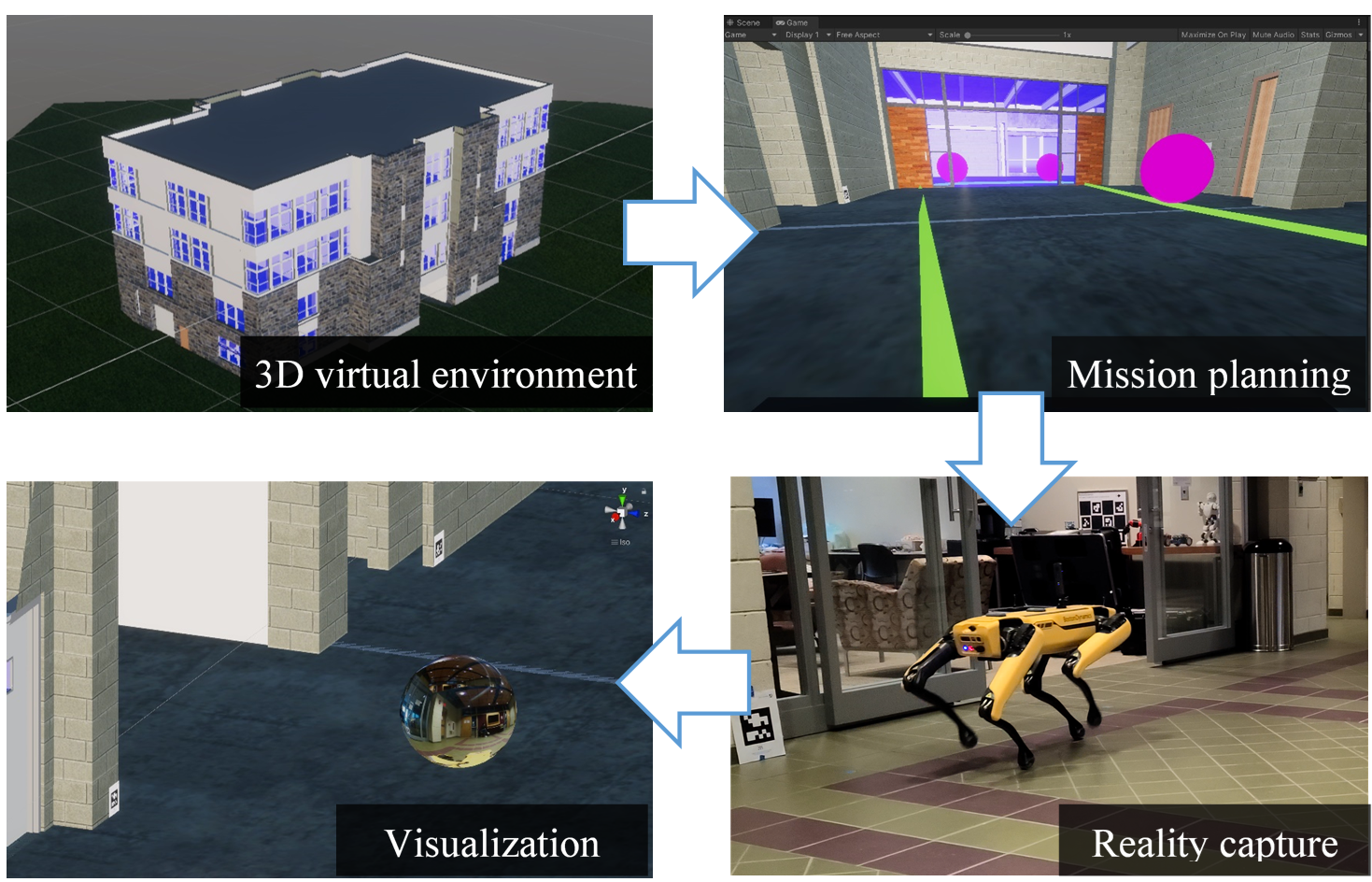
Construction inspection is an important part of the construction management process to ensure that the project is compliant with the requirements, regulations, and standards. Due to time and cost constraints, inspectors representing owners, as well as architects, designers, and other stakeholders might not be able to visit and inspect the project site in person as often as needed. Inspections performed by mobile robots can allow more frequent inspections and can help communicate project status with all stakeholders more regularly. This study explains the development of a methodology to capture the site reality with an autonomous legged robot through integrated visualization in a BIM-enabled 3D virtual environment. The proposed methodology can potentially facilitate construction inspectors to perform their day-to-day inspection tasks more efficiently. The proposed methodology consists of a 3D virtual environment integrated with the robot control. The methodology is further implemented in Unity Engine with a software application to visualize the space being inspected and control a legged robot simultaneously. The application captures 360° images of the space autonomously and visualizes the images in the virtual environment as discrete points of reality. This study can be useful to construction managers and inspectors to potentially reduce manpower in inspections of construction projects. The findings of the study can help develop more solutions to facilitate remote construction inspection using autonomous mobile robots.