Automation & Robotics in Construction And Design Engineering
Home Accuracy Estimation for Autonomous Navigation of a Quadruped Robot in Construction Progress Monitoring
Accuracy Estimation for Autonomous Navigation of a Quadruped Robot in Construction Progress Monitoring
Authors:
Srijeet Halder, Kereshmeh Afsari, John Serdakowski, Stephen DeVito, Ryan King
Year:
2021
Publisher:
International Conference on Computing in Civil Engineering
Abstract:
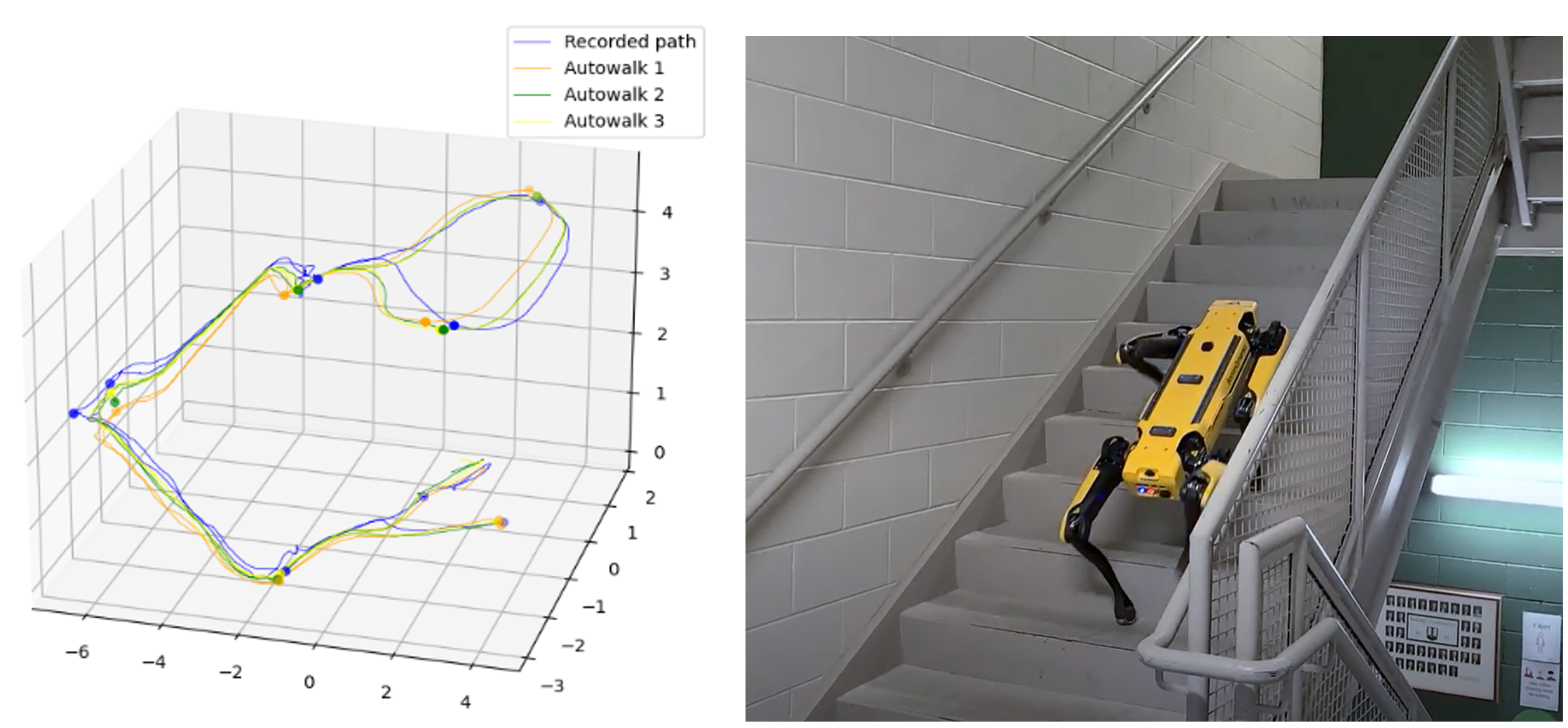
Construction progress monitoring is a critical inspection activity. It is mostly a manual process performed through in-person visual inspection which is time-consuming and prone to human error. The key in progress monitoring is accurate, timely, and regular data collection and analysis of the construction process. Autonomous data collection with mobile robots can potentially improve the accuracy of data acquisition for construction progress monitoring. This study uses a four-legged robot to automate data collection in construction progress monitoring. The goal is to study the navigation accuracy of the legged robot in the on-site data acquisition process of progress monitoring. The research studies human operator positioning in the data collection process and undertakes a set of experimental investigations with the legged robot to retrace the path recorded on its controller and analyze the accuracy of the robot's autonomous navigation in multiple missions. Findings reveal an Autowalk position error of 0.283m to 0.633m from the recorded path.