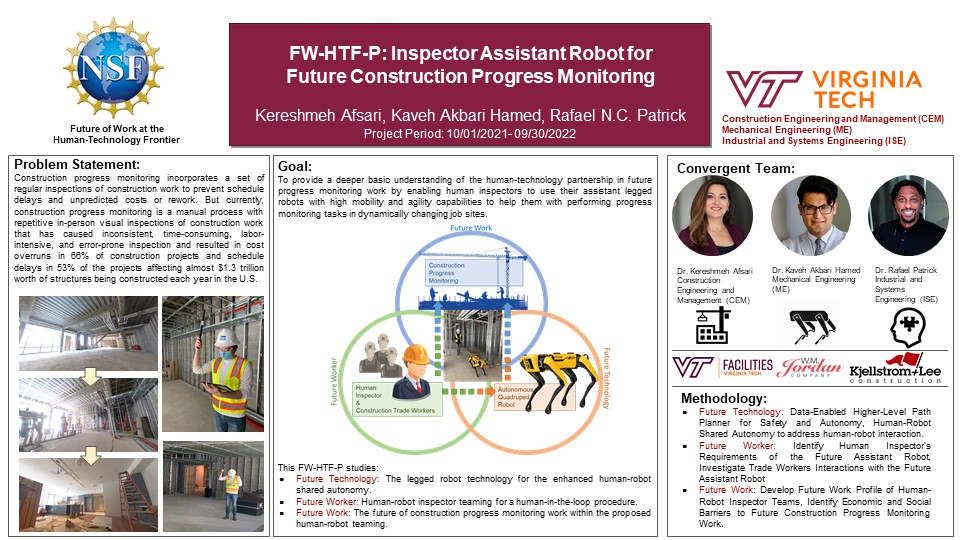
This convergent research employs the joint perspectives of construction engineering, human factors psychology, and robot control and autonomy to advance the fundamental understanding of future construction progress monitoring work. Nearly $1.3 trillion worth of structures are constructed each year in the U.S., while more than 53% of typical construction projects are behind schedule, and more than 66% suffer from cost overruns. Construction progress monitoring incorporates a set of regular inspections of construction work to prevent schedule delays and unpredicted costs or rework. But currently, construction progress monitoring is a manual process with repetitive in-person visual inspections of construction work that has resulted in inconsistent, time-consuming, labor-intensive, and error-prone inspection. The main goal of this research is to provide a deeper basic understanding of the human-technology partnership in future progress monitoring work by enabling human inspectors to use their assistant legged robots with high mobility and agility capabilities to help them with performing progress monitoring tasks in dynamically changing job sites. This project will create new knowledge of future work with human-robot inspector teams that can also be applied to future inspection in other domains. Findings from this research can transform future construction by creating new career opportunities that will be inclusive of individuals with disabilities. The project will also provide opportunities for education and outreach plans for middle-school and high school students. Partnerships with industry stakeholders will specifically guide discovering potential social and economic consequences of the human-robot inspector teams in future construction work.
This research aims to (i) develop autonomous and resilient quadrupedal robots that can traverse dynamically changing and unstructured construction environments for monitoring construction progress in human-robot inspector team performance, (ii) develop a conceptual framework for human-in-the-loop and human-robot teaming in future construction progress monitoring leveraging aspects of psychology, human-centered design, and usability engineering, and (iii) rethink the future of construction progress monitoring work within a socio-technical evolution through fostering engagement with industry stakeholders. This research creates new knowledge in (a) designing intelligent control and motion planning algorithms that enable safe and agile cooperative tasks of quadrupedal robots and human inspectors in unstructured environments of construction sites, (b) identifying human-centered design strategies in construction progress monitoring utilizing methodologies of human factors psychology for effective human-robot inspector teaming, and (c) understanding the fundamental transformation that the future of construction progress monitoring will encounter in transitioning from manual processes to human-robot inspector teaming.
PI: Kereshmeh Afsari
Co-PIs: Kaveh Akbari-Hamed (ME), Rafael Patrick (ISE)